
专业视觉、自动化设备、产线改造服务提供商
客户满意、科技创新、持续改善、品质至上
全国服务热线♂18020213086
全国服务热线♂18020213086
近年来,随着我国新能源汽车市场的爆发,动力电池需求不断增长。在电╳池预焊、周边焊、密封钉焊接、顶盖焊接等环节,焊缝容易出现炸焊、断焊、爆点、针孔、偏光等↘缺陷。这些缺陷严重影响动力电池的品质,产生安全▓隐患,焊接过程中缺陷的检测和预防变得越来越重要。锂电池「性能和品质的提升,不仅需要在材料和设计上不断突破,也需要在生产制造的工艺及设备上持续创新▽和改进。
机器视觉作为自动化设备的“眼睛”和“大脑”,将视觉检测引入到检测设备↘中已经成为主流趋势。图像处理系统的引入,将推动自动化设∑备向智能化方向转型,推进动力电池向高╲容量、高安全性、高品质以及低成本方向发展。面对当前市场环境,捷◥翔在软件、硬件和算法方←面不断进行技术研发和产品优化,以为锂电行业客户提供更好的产品和服务。
(一)算法创新
(1)异源数据融合的缺陷检测方案
3D相↑机在图像采集过程中,不仅可以获得2D灰度图像信息,也可以获々得3D高※度图像信息。如何将两者结合∞起来,解决焊接过程中的缺陷检测和分类,捷翔一直进行算法探索和测试。由于3D图像具有无☆效像素、不∏同产品和视角拍摄的高度范围差异很大等特点,将3D高度图像输入到深度学习检测网络中,训练过◥程很难收敛。捷翔采用自研※的异源数据融合算法,将灰度图像和深度图像进行融合,有效地提升了焊缝检测漏检率和误检率。
(2)基于自由曲面的图像差分检测方案
电池表面⌒并不是规则的平面,如果使用平面作为基准,很容易出现误检的现象。捷翔自研的自由曲面算√法,将高度图像〓进行局部插值采样处理,可以获得电池表面的局部范围近似㊣ 基准图像,然后基于图像差分方法,可以获得缺陷检测信息。
(3)基于深度学习的无效像★素填充算法
深度学【习在图像识别、目标分类等方面均有较好的应用,成为各个领域的一个研究热点,但是基于深度神经网络在深度◇图像中的应用和探〓索并不多。捷翔为了解决高度图像中的点云无效像素缺失的问题,基于卷积神经网络设计了无效像素填充算法,很好地修补了点云模型表面残〖缺的孔洞区域,算法基于CUDA进行并行算法优化,提升了焊缝检测的效率和准确率。
(二)软件Ψ平台创新
采用图形※化编程,让用户∴在可视化的环境下,进行参数配置,快速实现项目部署,缩短项目部署的周▓期。融合■图像采集、图像分析、通信等功能于一体,为客户提供端到端的视觉解决方案。图像分析模块涵盖测量、形位公差检※测(平面度、高度差、轮廓度、粗糙度等)、表面质量分析、识别(二维码、条形码、字符)以及3D视觉引导等。
视觉在线检测系统作为可同№时实现高度轮廓、三维点云数据采▅集和三维数据在线测量的3D应用系统,已经大批量应用于高精度、高速、在线3D定位、测量、缺陷检测场景。自研ζ算法和傻瓜式的操作使得非常适合各种非接触式测◎量场景,功能、性能及稳定性已①在苹果产线使用验证,得到客户的高度认同。
将传统图像处︾理与深度学习处理相结合,为客ω 户提供综合解决方案。利用卷积神经网络自动提取图像特征,从而实现产品瑕疵检测、分类等功能。深度々学习工具操作简单,零代码开○发,用户只需要手动标注目标,利用标注信息自动完成模型训练和学习,有效地解决了传统算法难以解决的◤复杂问题。在■锂电行业应用中,深度学习结合传统图像处理算法缺陷的正确检出率可达99.9%以上,缺陷等级和缺∏陷类别分类由传统的40%提升到98%以上。

(三)3D视觉和深度学习¤在锂电行业中的创新案例
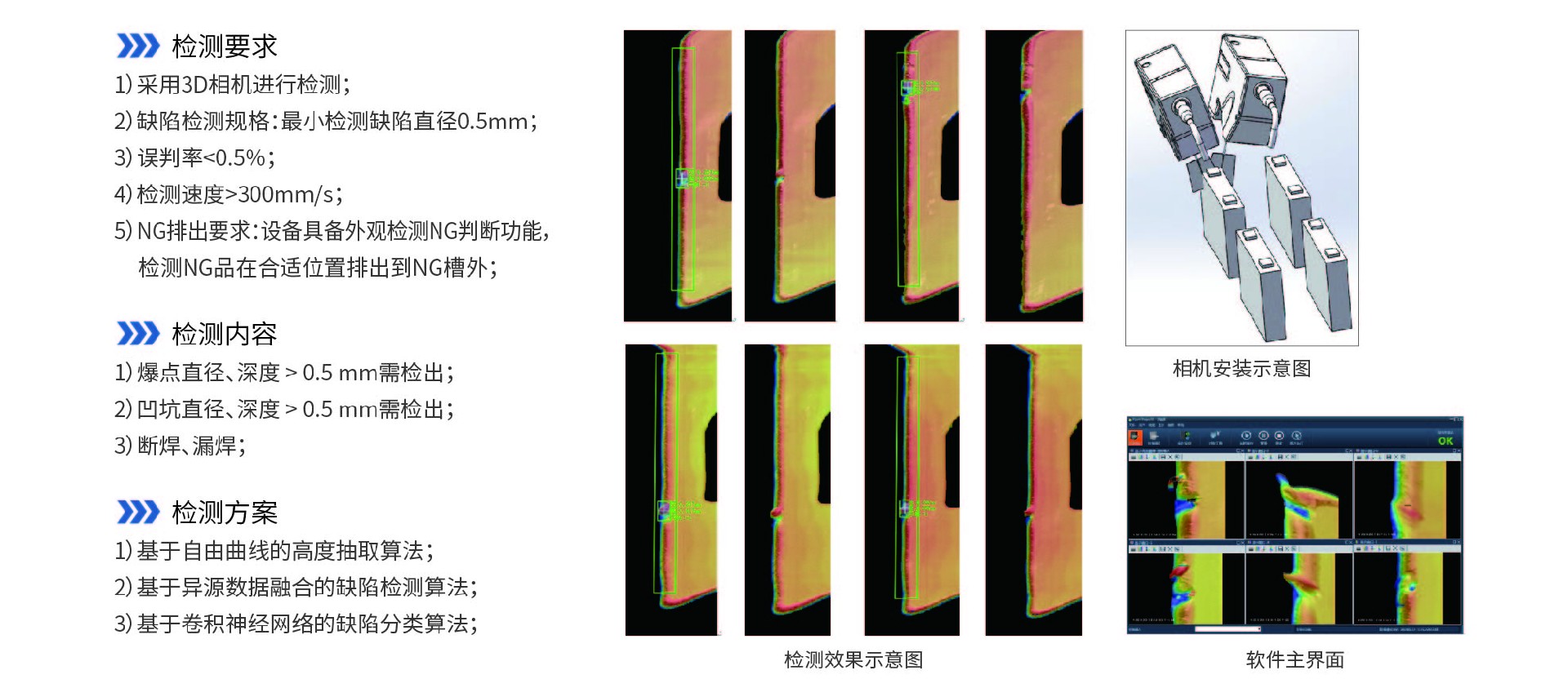
1、顶盖焊后检测
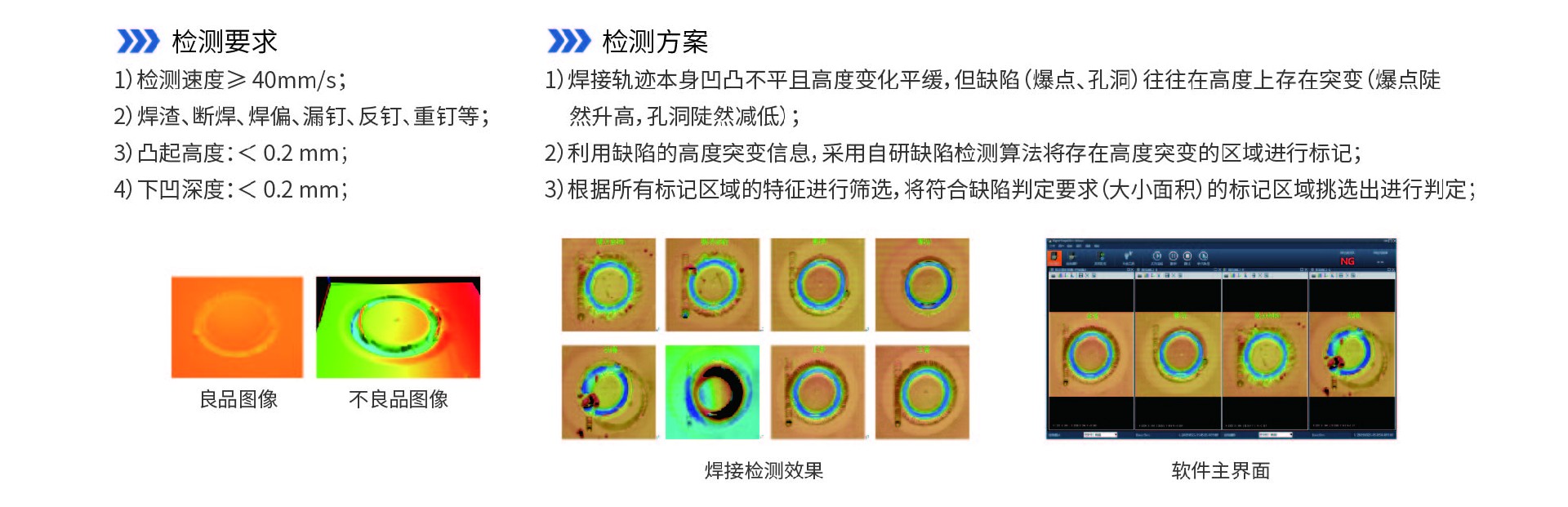
2、密封▆钉检测





 苏公网安备32058302003301号
苏公网安备32058302003301号